Handles the user UI of our encoder system. More...
Functions | |
| def | task_user.taskUser (taskname, period, zFlag, pFlag, dFlag, gFlag, position, delta, P, T) |
| A generator to implement the UI task as an Finite State Machine. More... | |
Variables | |
| task_user.S0_INIT = micropython.const(0) | |
| State 0 - Initialize. More... | |
| task_user.S1_CMD = micropython.const(1) | |
| State 1 - Command. More... | |
| task_user.S2_ZERO = micropython.const(2) | |
| State 2 - Zero Encoder. More... | |
| task_user.S3_POS = micropython.const(3) | |
| State 3 - Position. More... | |
| task_user.S4_DEL = micropython.const(4) | |
| State 4 - Delta. More... | |
| task_user.S5_DATA = micropython.const(5) | |
| State 5 - Data Collection. More... | |
| task_user.S6_HELP = micropython.const(6) | |
| State 6 - Help. More... | |
Detailed Description
Handles the user UI of our encoder system.
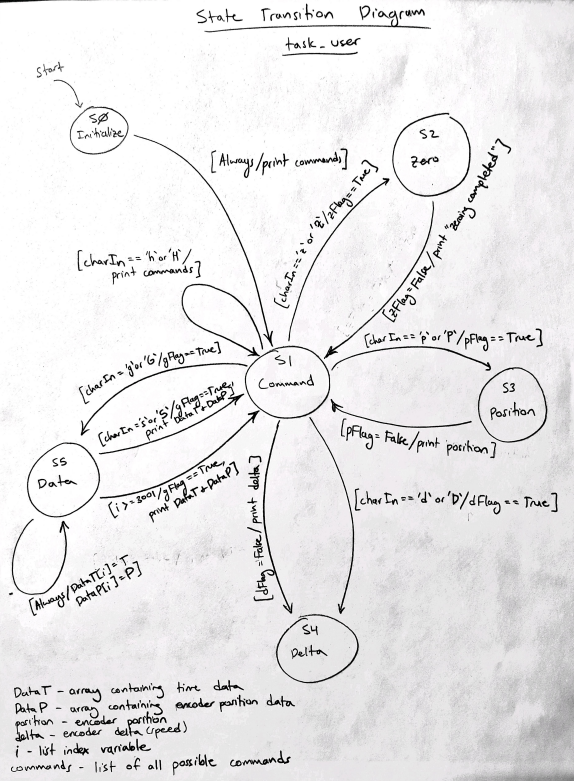
This file interacts directly with user keyboard inputs to then send the request to the task_encoder.py file. It uses six states that correspond to different key in puts to send the program into its appropriate settings based on the user input. These states are highlighted below:
S0-Initialization S1-Command S2-Zero S3-Position S4-Delta S5-Data S6-Help
The below image shows the state transition diagram employed for this task file:
- Date
- 2/1/2022
Function Documentation
◆ taskUser()
| def task_user.taskUser | ( | taskname, | |
| period, | |||
| zFlag, | |||
| pFlag, | |||
| dFlag, | |||
| gFlag, | |||
| position, | |||
| delta, | |||
| P, | |||
| T | |||
| ) |
A generator to implement the UI task as an Finite State Machine.
The task runs as a generator function and requires a task name and interval to be specified. This task file receives flag values altered by the user. These flags are then shared with task_encoder.py where that task file can execute actions defined in encoder.py. Once the desired task is completed, the state is reset back to idle state (State 1).
- Parameters
-
taskName The name of the task as a string. period Specifies how long the task has to perform its function in microseconds. Specified as an integer. zFlag Holds True or False value to know when zeroing command was called by the user to zero the current position of the encoder. pFlag Holds True or False value to know when position command was called by the user to know the current position of the encoder. dFlag Holds True or False value to know when delta command was called by the user to know the current delta (speed) of the encoder. gFlag Holds True or False value to know when data collection command was called by the user to collect current time and position data. position Stores current position of encoder to be read in task_user.py delta Stores the delta (speed) of the encoder to be read in to task_user.py P Stores current position of encoder for data collection T Stores current time of encoder for data collection
- Returns
- yield None
Variable Documentation
◆ S0_INIT
| task_user.S0_INIT = micropython.const(0) |
State 0 - Initialize.
State that corresponds to initializing encoder 1 and printing out the initial help menu.
◆ S1_CMD
| task_user.S1_CMD = micropython.const(1) |
State 1 - Command.
State that waits for a user input and transfers the user to the correct state based on that input.
◆ S2_ZERO
| task_user.S2_ZERO = micropython.const(2) |
State 2 - Zero Encoder.
State that zeros out the encoder
◆ S3_POS
| task_user.S3_POS = micropython.const(3) |
State 3 - Position.
State that returns position to the user
◆ S4_DEL
| task_user.S4_DEL = micropython.const(4) |
State 4 - Delta.
State that returns the delta(speed) of the encoder to the user
◆ S5_DATA
| task_user.S5_DATA = micropython.const(5) |
State 5 - Data Collection.
State that collects 30 seconds of data and outputs it to the user
◆ S6_HELP
| task_user.S6_HELP = micropython.const(6) |
State 6 - Help.
State that returns a help window to the user